
Режимы управления
Работа сервопривода может осуществляться в трех разных форматах. Рассмотрим каждый из них.
Контроль положения
Здесь нужно сохранять заданный угол поворота вала, подавая последовательность сигналов. Пусть они идут с контроллера – таким образом, можно обеспечить точное позиционирование, что особенно актуально для узлов производственных станков.
Обратите внимание, с помощью совокупности импульсов не проблема задать информацию не только о положении в пространстве, но и о векторе вращения или скорости движения. Сделать это можно одним из трех способов – направляя напряжение:
- со сдвигом фазы на 90 градусов;
- сразу на два входа (SIGN, PULSE – стандартные названия);
- с перемещением по часовой стрелке или против.
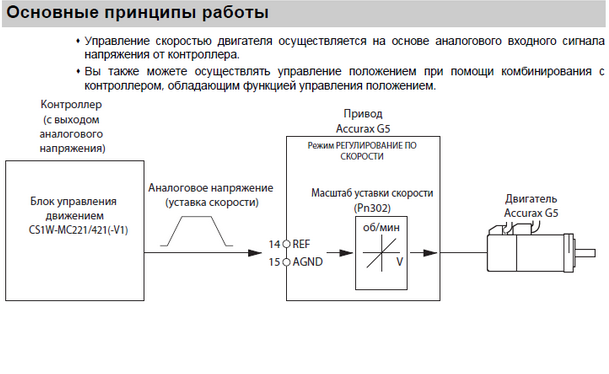
Контроль скорости
Здесь сервоуправление – это увеличение или уменьшение аналогового сигнала на дискретную величину при его подаче на соответствующие обмотки. А если он еще и разнополярный, тогда не составляет труда быстро менять направление вращения.
Данный режим напоминает эксплуатацию асинхронного силового агрегата с преобразователем частоты. Потому что в ее рамках требуется постоянно выполнять разгон и замедление, задавать минимумы и максимумы и тому подобное. Главное – реализовывать не слишком сложный алгоритм, чтобы не превращать рядовую практическую задачу в непосильный труд программирования.
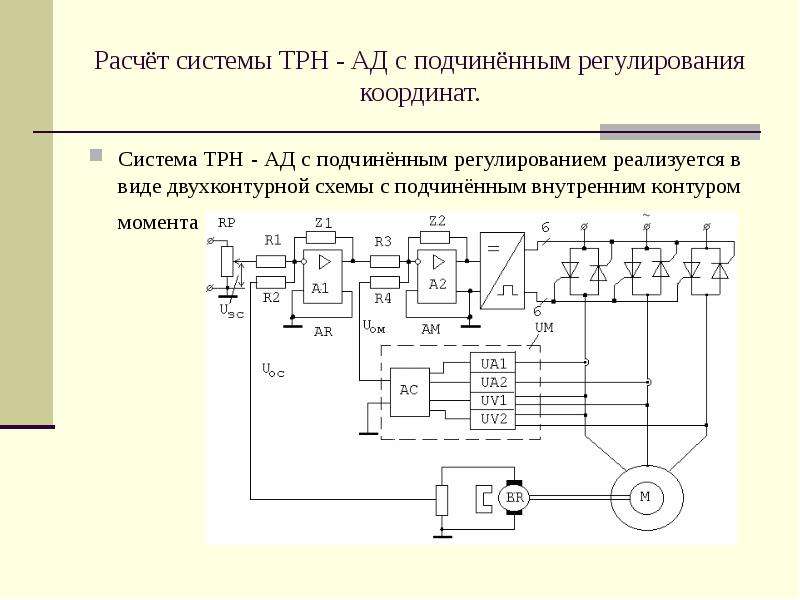
Контроль момента
В данном случае назначение сервопривода – обеспечивать стабильное число оборотов, вне зависимости от того, вращается двигатель или нет. Эта цель достигается путем подачи или дискретного сигнала, или аналогового двухполярного. Метод более чем актуален для оборудования, в процессе эксплуатации требующего смены давления, прижима или других параметров.
Внимание, силовой агрегат должен быть дополнительно оснащен встроенным датчиком тока, ведь именно последний и оценивает значение текущего момента, чтобы потом электроника могла сравнить его с необходимой величиной

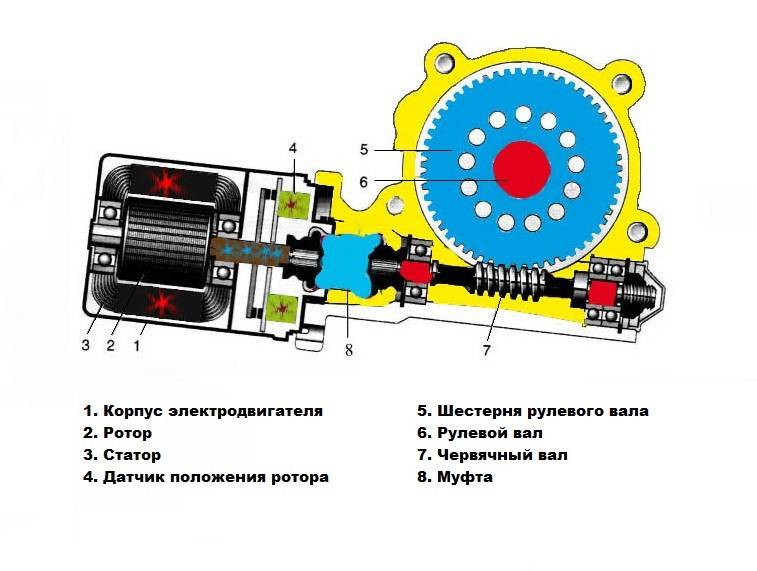
Сервопривод что такое и принцип работы
Сервопривод — сервомотор является электродвигателем, который осуществляет работу, основанную на принципе обратной связи. От ротора двигателя вращение через редуктор передается к управляющему механизму, обратная связь осуществляется управляющим блоком, который связан с датчиком, контролирующим угол поворота. Сервомоторами пользуются в автомобилях, чтобы обеспечить линейное и угловое перемещение элементов, к точному положению которых предъявляются высокие требования. Принцип работы сервопривода основан на корректировки работы электродвигателя, чтобы исполнить управляющий сигнал.
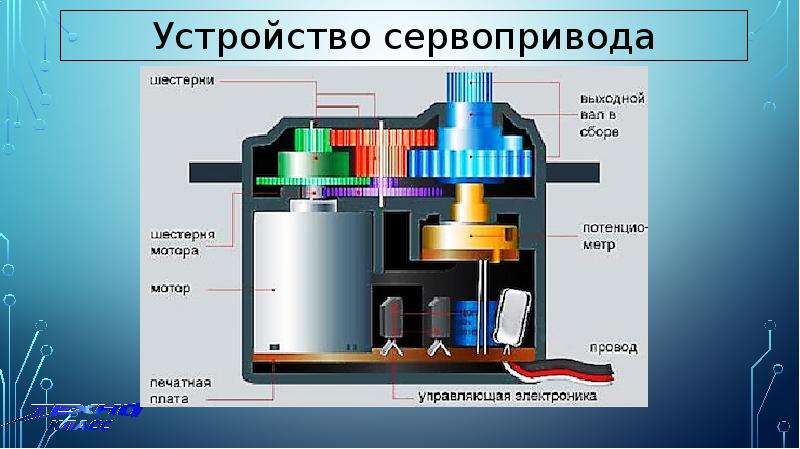
Сервопривод — состав и назначение
Если управляющим сигналом задается угол, с которым поворачивается выходной вал мотора, он преобразуется в подаваемое напряжение. Для обратной связи используют датчик, измеряющий одну из выходных характеристик мотора. Показания, собираемые датчиком обрабатывается блоком управления, затем корректируется работа серводвигателя.
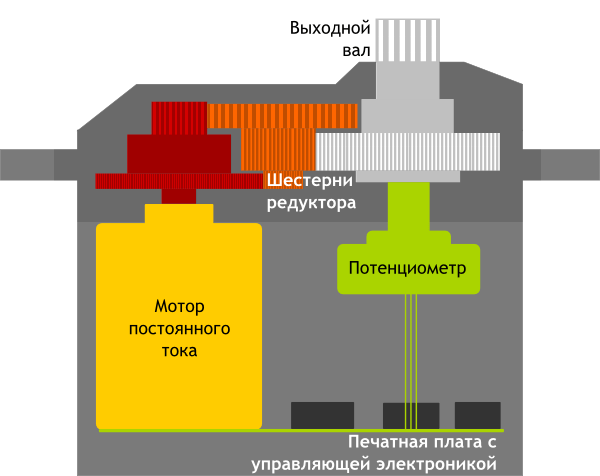
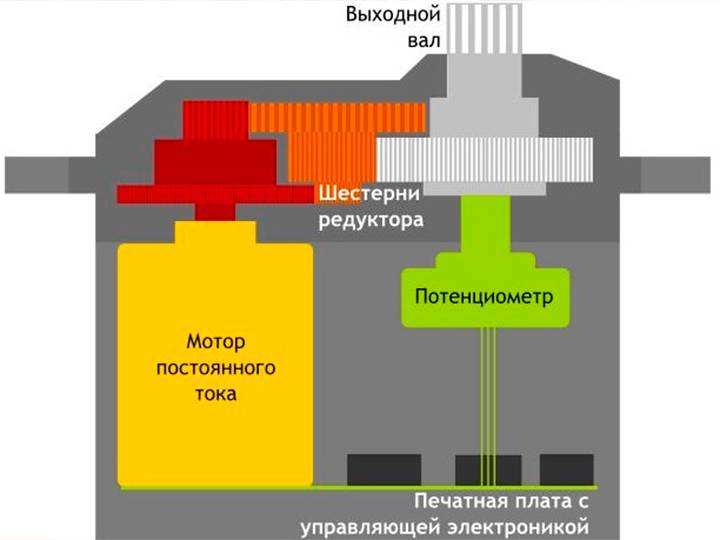
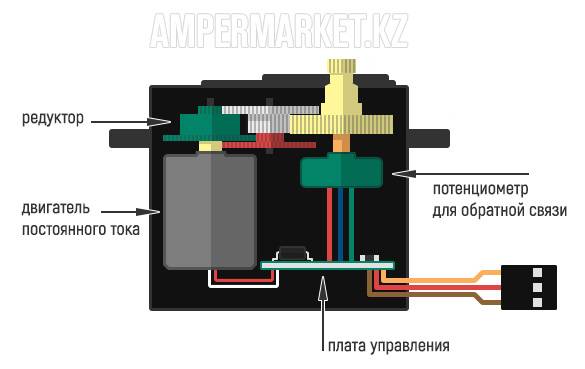
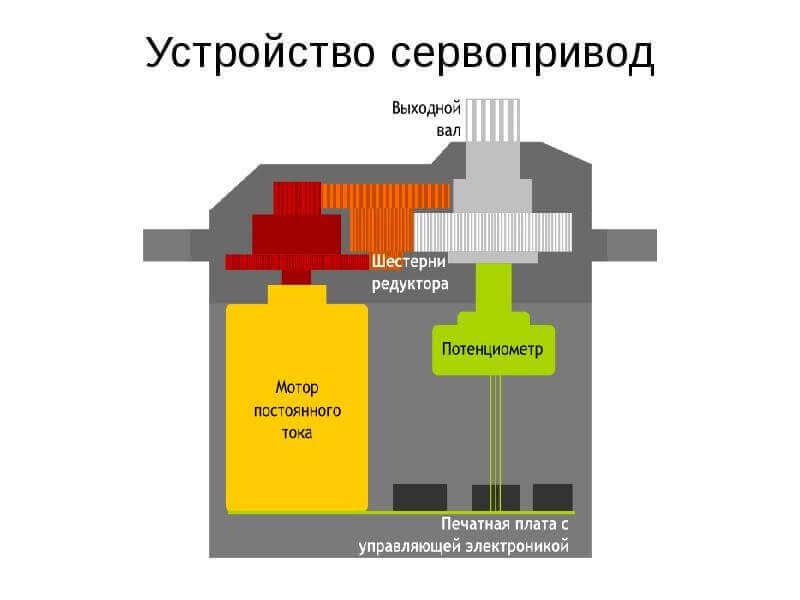
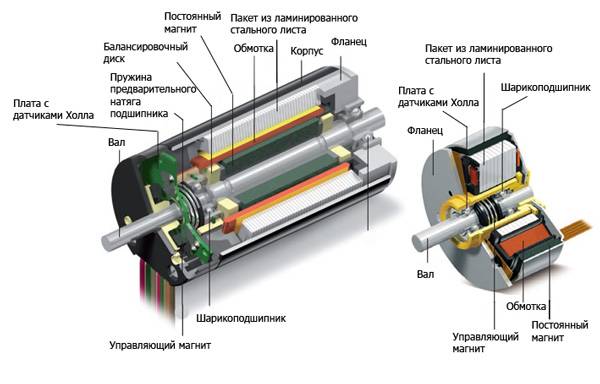
Конструкция сервопривода состоит из электромеханического узла, элементы которого располагаются внутри одного корпуса. Сервопривод включает редуктор, электродвигатель, блок управления и датчик.
Основные характеристики сервопривода это рабочее напряжение питания, крутящий момент, частота вращения, материалы и конструктивные, используемый в конкретной модели.
Сервопривод — конструктивные и рабочие особенности
На современных сервоприводах пользуются двумя типами электромоторов с полым ротором и сердечником. Моторы с сердечником располагают ротором с обмоткой, и магнитами постоянного тока размещенными вокруг. Особенность этих электромоторов заключается в возникновении вибраций при вращении маятника, что приводит к снижению точности угловых перемещений.
Моторы, имеющие полый ротор не обладают таким недостатком, но являются более дорогими из-за сложной технологии производства.
Редукторы сервоприводов нужны чтоб понижать частоту вращения и увеличивать крутящий момент выводного вала. Многие редукторы сервоприводов включают цилиндрическую зубчатую передачу, шестерни, изготовленные из полимерных материалов и металла. Для металлических редукторов характерна высокая стоимость, но при этом отличаются прочностью и долговечностью.

Сервопривод также различается типом используемого управляющего блока, которые бывают аналоговыми и цифровыми. Цифровыми блоками обеспечивается более точное позиционирование основного элемента сервопривода и большая скорость реакции.
Сервопривод – механизм, позволяющий устанавливать и фиксировать рабочий орган оборудования в заданных положениях, перемещать его в соответствии с заданной программой. Перемещение не единственная задача устройств, они могут поддерживать необходимый момент на валу при нулевой скорости вращения вала. Это используется для удержания исполнительного механизма в одном положении под нагрузкой.
Сервоприводы устанавливают на станках с ЧПУ, грузоподъемных механизмах, промышленных роботах. Сфера применения сервопривода не ограничивается производством. Механизмы применяют в бытовой технике, системах отопления и кондиционирования, автотранспорте.

Сфера применения устройства
Ранее его использовали только в роли вспомогательного устройства, но теперь области его применения начали стремительно расти. В наше время он используется для сервомеханизмов и именно в этой области заключается его главное применение.





Они используются в очень многих сферах, но как и любые другие приборы, у сервопривода есть области, для которых эти устройства подходят лучше всего. Самые широкие сферы применения устройства:
- Изготовление бумаги и упаковок стало намного быстрее и эффективнее, именно поэтому их используют в этой области чаще всего.
- Отлично справляется с изготовлением листов из металла.
- Создание промышленных роботов.
- Производится транспортное оборудование.
- Постоянно используется в деревообрабатывающей промышленности.
Мастерам на все руки будет интересна статья о самостоятельном изготовлении приспособления для заточки сверл.
Сервопривод переменного тока
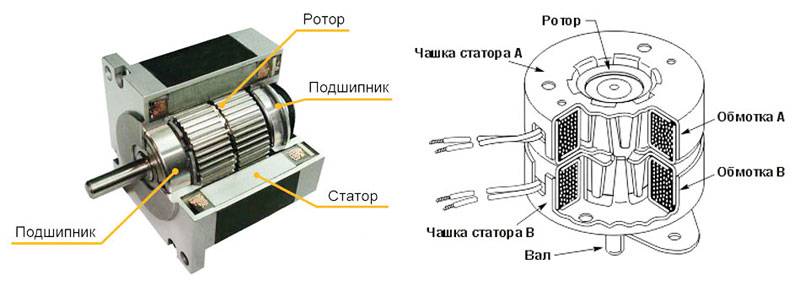
В сервоприводах переменного тока используется синхронный двигатель с мощными постоянными магнитами. В таких двигателях частота вращения ротора совпадает с частотой вращения магнитного поля, наводимого в обмотке статора.
Принцип работы сервопривода на основе трехфазного синхронного электродвигателя состоит в следующем. На обмотки статора поступает трехфазное напряжение, которое создает внутри него вращающееся магнитное поле. Это поле взаимодействует с постоянными магнитами, расположенными в роторе. В результате ротор вращается с частотой магнитного поля.
На валу ротора закреплен энкодер с высокой разрешающей способностью. Сигнал от него поступает по отдельному кабелю на специальный вход сервоусилителя. В то же время на управляющий вход сервоусилителя подается сигнал управления. В результате сравнения этих двух сигналов выделяется сигнал рассогласования, величина которого прямо пропорциональна разнице между целевыми и актуальными показателями вращения двигателя. На основании данного сигнала формируется трехфазное напряжение с такими параметрами, которые обеспечивают максимально быстрое уменьшение рассогласования до нуля.
Виды сервоприводов
Их классифицируют главным образом по типу используемого двигателя, выделяя:
- синхронные – отличаются быстрым набором оборотов, а также прецизионным вращением;
- асинхронные – их ключевая черта в высокой стабильности поведения вала;
- универсальные – оснащены коллекторным силовым агрегатом, либо переменного, либо постоянного тока.
Первые особенно востребованы в автомобилестроении и активно устанавливаются в АКПП – для беспроблемного переключения передач. Также они актуальны для спецтехники, транспортирующей грузы весом свыше 100 кг. Вторые и третьи больше ориентированы на различное промышленное оборудование.
Если всесторонне рассматривать серводвигатель – что это такое, принцип работы, разновидности, – то нужно уделить внимание и его основным рабочим параметрам. В списке ключевых характеристик всех его моделей:
- крутящий момент (создаваемое усилие) – обязательно прописывается в паспорте, причем сразу в двух величинах, для разного питающего напряжения;
- вариант подаваемого импульса, ведь можно управлять с помощью как цифрового, так и аналогового сигнала;
- быстродействие – определяет время, за которое вал перемещается (по часовой стрелке или против нее) на 60 градусов;
- поддерживаемый угол поворота – обычно это либо 180 0 (полуцикл), либо 360 0 (полный); хотя сегодня есть модифицированные модели, у которых вращение осуществляется непрерывно;
- материал исполнения редукторных шестеренок – это может быть пластик, карбон, латунь или композит;
- напряжение – варьируется в диапазоне от 4,8 до 7,2 В (у основной группы силовых агрегатов);
- цвета проводов и распиновка – обычно все стандартно: черный – общий, красный – питания, белый (желтый или коричневый) – контроля.
Еще немного нюансов: устройство сервомотора может предполагать наличие двигателя с сердечником. Это не лучший вариант, так как при его функционировании появляются вибрации, которые снижают точность вращения вала. Поэтому практичнее выбирать модели, у которых кинетическая энергия ротора на практике будет минимальной, даже несмотря на то, что они стоят несколько дороже. Это особенно актуально в случаях с эксплуатацией ЧПУ-станков, выполняющих сложные детали.
Еще один важный фактор различия видов – габаритные размеры, а именно соотношение ДхШхВ и вес. В соответствии с ними выделяют три группы силовых агрегатов:
- малые – 22 на 15 на 25 мм и до 25 г;
- стандартные (средние) – 40 на 20 на 37 мм и до 80 г;
- большие – 49 на 25 на 40 мм и до 90 г.
Следующее различие – по интерфейсу:
- аналоговые – импульсы обрабатывает микросхема;
- цифровые – сигналы считывает процессор.
Решая, для чего нужен сервопривод, помните, что нюансы – в начинке, а внешнее исполнение может быть абсолютно одинаковым.
Также разнообразие моделей можно разделить по материалу шестеренок – на такие группы:
- с пластиковыми (нейлоновыми) – легкими, стойкими к износу, но не к большим нагрузкам;
- с карбоновыми – более прочными, при этом не обладающими значительным весом, но и стоящими в несколько раз дороже предыдущих;
- с металлическими (латунными, титановыми) – тяжелыми, выдерживающими даже самый серьезный крутящий момент, но стирающимися друг о друга.
И, наконец, существуют варианты с сердечником (коллекторные) и без него. У первых есть полый ротор в несколько секций, между которыми появляется вибрация в процессе вращения. Поэтому они менее точны, чем те, чья подвижная часть полая, а также тяжелее и обеспечивают более долгий отклик, правда, и стоят дешевле.

Принцип работы цифровой конструкции
Цифровыми устройствами используется специальный процессор, функционирующий на высоких частотах. Он обрабатывает сигнал приемника и посылает импульсы управления в двигатель с показателем частоты в 300 раз в секунду. Так как показатель частоты значительно выше, то и реакция заметно быстрее и держит позицию лучше. Это вызывает оптимальное центрирование и высокий уровень кручения. Но такой метод требует больших затрат энергии, поэтому батарея, используемая в аналоговом механизме, в этой конструкции будет разряжаться намного быстрее.
Однако все пользователи, которые хоть однажды столкнулись с цифровой моделью, говорят о том, что ее различие с аналоговой конструкцией настолько значительно, что они никогда бы больше не употребляли последнюю.
Характеристики сервоприводов
Устройства выпускаются аналогового и цифрового типов. Приводы внешне ничем не отличаются, но различие между ними существенное. Последние обладают более точной отработкой команд, поскольку управление производится микропроцессорами. Для сервоприводов пишутся и вводятся программы. Аналоговые устройства работают от сигналов микросхем. Их преимуществами являются простое устройство и меньшая цена.
Основными параметрами для выбора являются следующие:
- Питание. Подача напряжения производится по трем проводам. По белому передают импульс, через красный – рабочее напряжение, черный или коричневый является нейтральным.
- Размеры: большие, стандартные и микроустройства.
- Скорость. От нее зависит, за какой промежуток времени вал повернется на угол 60. Недорогие устройства обладают скоростью 0,22 сек. Если требуется высокое быстродействие, она составит 0,06 сек.
- Величина момента. Параметр является приоритетным, поскольку при малом вращающем моменте управление затрудняется.
Виды и характеристики
Серводвигатели выпускаются в самых разных вариантах, позволяющих использовать их во многих областях. Основные конструкции разделяются на коллекторные и бесколлекторные, предназначенные для работы от постоянного и переменного тока.
Кроме того, каждый сервомотор может быть синхронным и асинхронным. Синхронные устройства обладают способностью задавать высокоточную скорость вращения, а также углы поворотов и ускорение. Эти приводы очень быстро набирают номинальную скорость вращения. Сервоприводы в асинхронном исполнении управляются за счет изменения параметров питающего тока, когда его частота меняется с помощью инвертора. Они с высокой точностью выдерживают заданную скорость даже при самых низких оборотах.

В зависимости от принципиальной схемы и конструкции, сервоприводы могут быть электромеханическими и электрогидромеханическими. Первый вариант, включающий редуктор и двигатель, отличается низким быстродействием. Во втором случае действие происходит очень быстро за счет движения поршня в цилиндре.
Каждый сервопривод характеризуется определенными параметрами:
- Крутящий момент или усилие, создаваемое на валу. Считается наиболее важным показателем работы сервопривода. Для каждой величины напряжения существует собственный крутящий момент, отражаемый в паспорте изделия.
- Скорость поворота. Данный параметр представляет собой определенный период времени, который требуется, чтобы изменить позицию выходного вала на 600. Эта характеристика также зависит от конкретного значения напряжения.
- Максимальный угол поворота, на который может развернуться выходной вал. Чаще всего эта величина составляет 180 или 3600.
- Все сервоприводы разделяются на цифровые и аналоговые. В зависимости от этого и осуществляется управление сервоприводом.
- Питание серводвигателей. В большинстве моделей используется напряжение от 4,8 до 7,2В. Питание и управление осуществляется с помощью трех проводников.
- Возможность модернизации в сервопривод постоянного вращения.
- Материалы для редуктора могут использоваться самые разные. Шестерни изготавливаются из металла, карбона, пластика или комбинированных составов. Каждый из них обладает своими преимуществами и недостатками. Например, пластиковые детали плохо выдерживают ударные нагрузки, но устойчивы к износу в процессе длительной эксплуатации. Металлические шестерни, наоборот, быстро изнашиваются, зато они обладают высокой устойчивостью к динамическим нагрузкам.
Дополнительные возможности
Управление сервоприводами на Ардуино очень простое и мы можем использовать еще несколько интересных фишек.
Контроль точного времени импульса
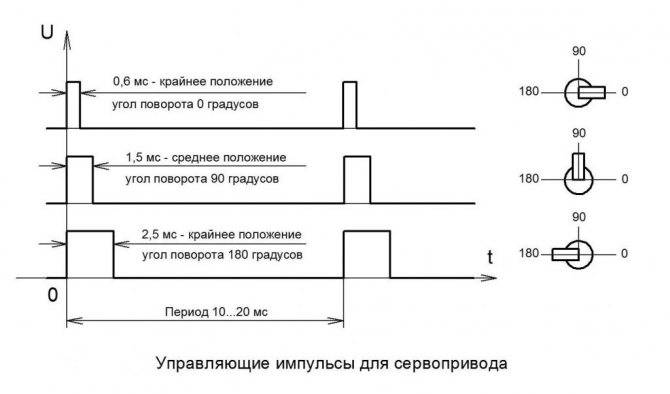
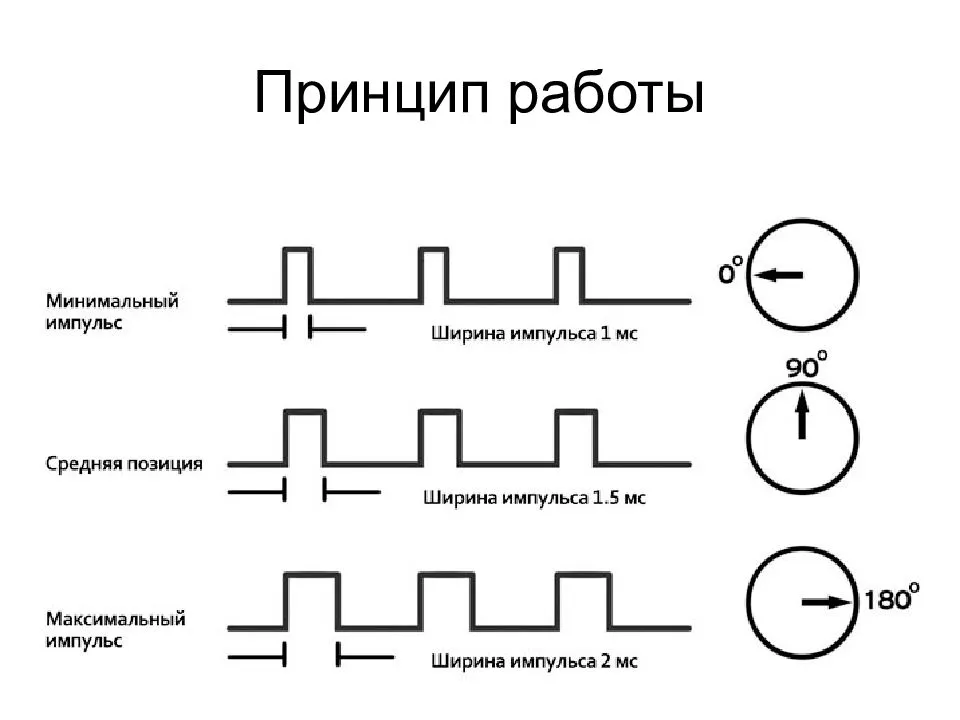
Ардуино имеет встроенную функцию servo.write(градусы), которая упрощает управление сервомоторами. Однако не все сервоприводы соблюдают одинаковые тайминги для всех позиций. Обычно 1 миллисекунда означает 0 градусов, 1,5 миллисекунды – 90 градусов, и, конечно, 2 миллисекунды означают 180 градусов. Некоторые сервоприводы имеют меньший или больший диапазон.
![Сервоприводы: устройство, принцип работы и основные виды [амперка / вики]](https://tverdotop-kotel.ru/wp-content/uploads/5/b/9/5b968026583db493be4a3c2ccb7c7ca3.gif)


Для лучшего контроля мы можем использовать функцию servo.writeMicroseconds(микросекунды), которая в качестве параметра принимает точное количество микросекунд. Помните, 1 миллисекунда равна 1000 мкс.
Несколько сервоприводов
Чтобы использовать более одного сервопривода в Ардуино нам нужно объявить несколько серво-объектов, прикрепить разные контакты к каждому из них и обратиться к каждому индивидуально. Итак, нам нужно объявить объекты – столько сколько нам нужно:
// Создаем объекты Servo Servo1, Servo2, Servo3;
Затем нам нужно прикрепить каждый объект к сервомотору. Помните, что каждый сервопривод использует отдельный пин:
Servo1.attach(servoPin1); Servo2.attach(servoPin2); Servo3.attach(servoPin3);
В конце концов, мы должны обращаться к каждому объекту индивидуально:
Servo1.write(0); // Задать для Servo 1 позицию в 0 градусов Servo2.write(90); // Задать для Servo 2 позицию в 90 градусов
Подключение. Земля сервоприводов идёт на GND Arduino, питание на 5В или VIN (в зависимости от входа). И, в конце концов, каждый привод должен быть подключен к отдельному цифровому выводу.
Вопреки распространенному мнению, сервоприводами не нужно управлять через пины PWM – любой цифровой пин подойдет и будет работать.
Управление мышью
Чтобы управлять серво с помощью мыши, вот простой код:
/**
* Servocontrol (derived from processing Mouse 1D example.)
*
* Updated 24 November 2007
*/
// Use the included processing code serial library
import processing.serial.*;
int gx = 15;
int gy = 35;
int spos=90;
float leftColor = 0.0;
float rightColor = 0.0;
Serial port; // The serial port
void setup()
{
size(720, 720);
colorMode(RGB, 1.0);
noStroke();
rectMode(CENTER);
frameRate(100);
println(Serial.list()); // List COM-ports
//select second com-port from the list
port = new Serial(this, Serial.list(), 19200);
}
void draw()
{
background(0.0);
update(mouseX);
fill(mouseX/4);
rect(150, 320, gx*2, gx*2);
fill(180 - (mouseX/4));
rect(450, 320, gy*2, gy*2);
}
void update(int x)
{
//Calculate servo postion from mouseX
spos= x/4;
//Output the servo position ( from 0 to 180)
port.write("s"+spos);
// Just some graphics
leftColor = -0.002 * x/2 + 0.06;
rightColor = 0.002 * x/2 + 0.06;
gx = x/2;
gy = 100-x/2;
}Вам не обязательно использовать этот код, вы также можете отправлять команды на плату arduino с серийного монитора Arduino IDE. Позиция сервопривода от 0 до 180 – это команды 0 и 180 сек соответственно.
В основном этот код берет позицию mouseX (от 0 до 720) и делит на 4, чтобы получить угол для сервопривода (0-180). Наконец, значение выводится на последовательный порт с префиксом ‘s’.
Примечание: «s» на самом деле должен быть суффиксом, но поскольку это повторяется, это не имеет значения для результата.
Не забудьте сначала проверить с помощью println(Serial.list ()) COM-порт, который следует использовать.
Сервоприводы с непрерывным вращением
Существует специальные типы сервоприводов, обозначенные как сервоприводы непрерывного вращения. В то время как нормальный сервопривод переходит в определенную позицию в зависимости от входного сигнала, сервопривод непрерывного вращения вращается по часовой стрелке или против часовой стрелки со скоростью, пропорциональной сигналу.
Например, функция Servo1.write(0) заставит сервомотор вращаться против часовой стрелки на полной скорости. Функция Servo1.write(90) остановит двигатель, а Servo1.write(180) будет вращать вал по часовой стрелке на полной скорости.
Таким сервоприводам нашли несколько применений, но нужно понимать, что они достаточно медленные. Один из вариантов – микроволновая печь, когда есть необходимость в двигателе для вращения продуктов питания. Но будьте осторожны, микроволны – опасное дело!
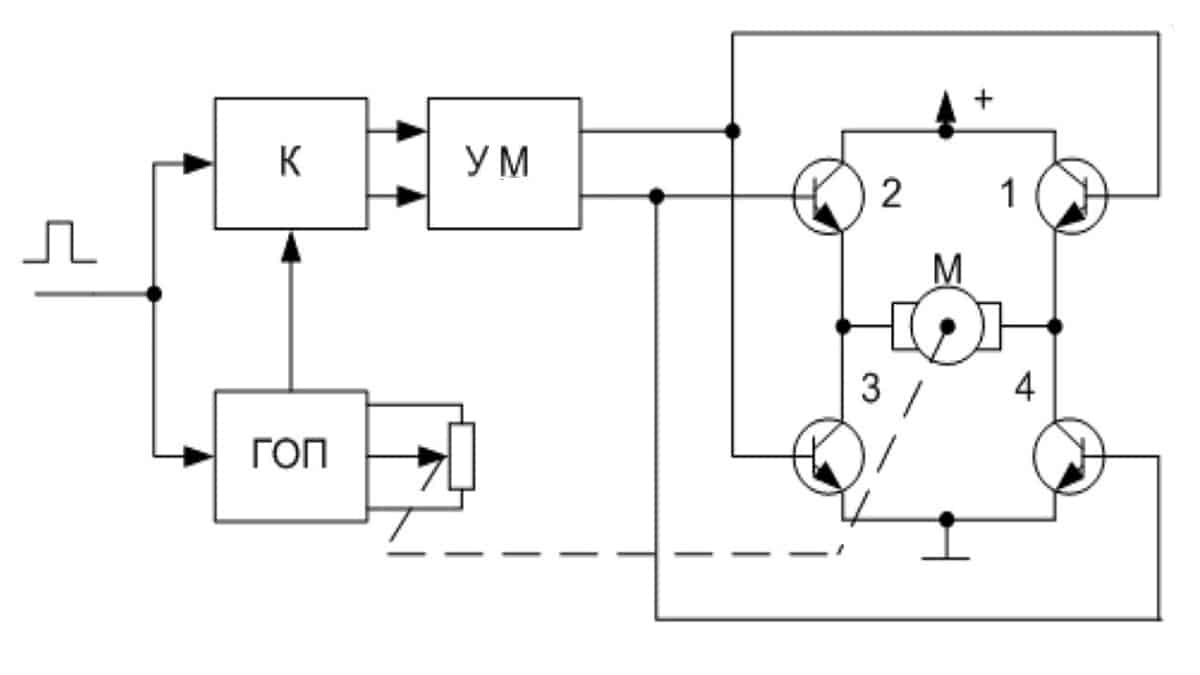
Принцип работы
программа управления серводвигателями Mach3
Основным аспектом функционирования серводвигателей является условия его работы в рамках системы G-кодов, то есть команд управления, содержащихся в специальной программе. Если рассматривать данный вопрос на примере ЧПУ, то сервомоторы функционируют во взаимодействии с преобразователями, которые изменяют величину напряжения на якоре или на возбуждающей обмотке двигателя, исходя из уровня входного напряжения. Обычно управление всей системой производится с помощью стойки ЧПУ. При получении команды из стойки пройти определенное расстояние вдоль координатной оси Х, в субблоке цифрового аналогового преобразователя стойки создается напряжение некоторой величины, которое передается для питания привода указанной координаты. В сервомоторе начинается вращение ходового винта, с которым связан энкодер и исполнительный орган станка. В первом происходит выработка импульсов, подсчитываемых стойкой. Программа предусматривает, что некоторое количество сигналов с энкодера соответствует определенному расстоянию прохождения исполняющего механизма. При получении нужного количества импульсов аналоговый преобразователь выдает нулевое значение выходного напряжения, и сервомотор останавливается. В случае смещения под внешним воздействием рабочих элементов станка на энкодере формируется импульс, обсчитываемый стойкой, на привод подается напряжение рассогласования, и якорь двигателя поворачивается до получения нулевого значения рассогласования. В результате обеспечивается точное удержание рабочего элемента станка в заданном положении.
Виды и характеристики
Серводвигатели выпускаются в самых разных вариантах, позволяющих использовать их во многих областях. Основные конструкции разделяются на коллекторные и бесколлекторные, предназначенные для работы от постоянного и переменного тока.
Кроме того, каждый сервомотор может быть синхронным и асинхронным. Синхронные устройства обладают способностью задавать высокоточную скорость вращения, а также углы поворотов и ускорение. Эти приводы очень быстро набирают номинальную скорость вращения. Сервоприводы в асинхронном исполнении управляются за счет изменения параметров питающего тока, когда его частота меняется с помощью инвертора. Они с высокой точностью выдерживают заданную скорость даже при самых низких оборотах.
Скетч для управления сервоприводом в Arduino
Для управления углом поворота сервопривода, в программном коде можно либо вбивать ширину имлульсов вручную и подбирать точный угол, либо задавать угол в виде градусов при помощи команды библиотеки.
ЧИТАТЬ ДАЛЕЕ: Промежуточное реле назначение принцип действия
• Вариант 1
В данном скетче зададим 3 угла поворота выходного вала сервопривода используя управление изменением непосредственно значения ширины импульса. Данный метод самый точный, однако для каждого угла ширину импульсов придется подбирать индивидуально.
//Тестировалось на Arduino IDE 1.0.1// добавляем библиотеку для работы с сервоприводами #include {amp}lt;Servo.h{amp}gt; // для дальнейшей работы назовем 9 пин как servoPin #define servoPin 9 // 544 это эталонная длина импульса при котором сервопривод должен принять положение 0° #define servoMinImp 544 // 2400 это эталонная длина импульса при котором сервопривод должен принять положение 180° #define servoMaxImp 2400 Servo myServo; voidsetup() { myServo.attach(servoPin, servoMinImp, servoMaxImp); // устанавливаем пин как вывод управления сервоприводом,// а также для работы сервопривода непосредственно в диапазоне углов от 0 до 180° задаем мин и макс значения импульсов.// импульсы с большей или меньшей длиной восприниматься не будут.// для сервоприводов даже одной партии значения длин импульсов могут отличаться, может быть даже и 584-2440.// поэкспериментируйте и найдите идеальные длины импульсов конкретно для вашего сервопривода. } voidloop() { // устанавливаем качалку сервопривода в положение 0°(т.к.импульс равен 544мкс) myServo.writeMicroseconds(servoMinImp); delay(2000); // в данной функции можно задавать длины импульсов непосредственно числами. // 90°(т.к.vимпульс равен 1520мкс) myServo.writeMicroseconds(1520); delay(2000); // 180°(т.к. импульс равен 2400мкс) myServo.writeMicroseconds(servoMaxImp); delay(2000); }
• Вариант 2
//Тестировалось на Arduino IDE 1.0.1 #include {amp}lt;Servo.h{amp}gt; Servo myservo; voidsetup() { // устанавливаем пин как вывод управления сервой myservo.attach(9); } voidloop() { // устанавливаем угол 0° myservo.write(0); delay(2000); // устанавливаем угол 90° myservo.write(90); delay(2000); // устанавливаем угол 180° myservo.write(180); delay(2000); } myservo.read();Считывает текущий угол поворота сервопривода, возвращает значение типа int — угол от 0 до 180 градусов.
myservo.attached();Проверяем, привязан ли сервопривод. Возвращает логическое значение bool.
myservo.detach();Отключает сервопривод от пина.
• Что такое сервопривод?
• Отличие цифрового сервопривода от аналогового
Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки.





Сравнение с шаговым двигателем
Другим вариантом точного позиционирования приводимых элементов без датчика обратной связи является применение шагового двигателя. В этом случае схема управления отсчитывает необходимое количество импульсов (шагов) от положения репера (этой особенности обязан характерный шум шагового двигателя в дисководах 3,5″ и CD/DVD при попытках повторного чтения). При этом точное позиционирование обеспечивается параметрическими системами с отрицательной обратной связью, которые образуются взаимодействующими между собой соответствующими полюсами статора и ротора шагового двигателя. Сигнал задания для соответствующей параметрической системы формирует система управления шаговым двигателем, активизирующая соответствующий полюс статора.
Так как датчик обычно контролирует приводимый элемент, электрический сервопривод имеет следующие преимущества перед шаговым двигателем
- не предъявляет особых требований к электродвигателю и редуктору — они могут быть практически любого нужного типа и мощности (а шаговые двигатели, как правило, маломощны и тихоходны);
- гарантирует максимальную точность, автоматически компенсируя: механические (люфты в приводе) или электронные сбои привода;
- постепенный износ привода, шаговому же двигателю для этого требуется периодическая юстировка;
- тепловое расширение привода (при работе или сезонное), это было одной из причин перехода на сервопривод для позиционирования головок в жестких дисках;
- обеспечивая немедленное выявление отказа (выхода из строя) привода (по механической части или электронике);
большая возможная скорость перемещения элемента (у шагового двигателя наименьшая максимальная скорость по сравнению с другими типами электродвигателей);
затраты энергии пропорциональны сопротивлению элемента (на шаговый двигатель постоянно подаётся номинальное напряжение с запасом по возможной перегрузке);
Недостатки в сравнении с шаговым двигателем
- необходимость в дополнительном элементе — датчике;
- сложнее блок управления и логика его работы (требуется обработка результатов датчика и выбор управляющего воздействия, а в основе контроллера шагового двигателя — просто счётчик);
- проблема фиксирования: обычно решается постоянным притормаживанием перемещаемого элемента либо вала электродвигателя (что ведёт к потерям энергии) либо применение червячных/винтовых передач (усложнение конструкции) (в шаговом двигателе каждый шаг фиксируется самим двигателем).
- сервоприводы, как правило, дороже шаговых.
Сервопривод, однако, возможно использовать и на базе шагового двигателя или в дополнение к нему до некоторой степени совместив их достоинства и устранив конкуренцию между ними (сервопривод осуществляет грубое позиционирование в зону действия соответствующей параметрической системы шагового двигателя, а последняя осуществляет окончательное позиционирование при относительно большом моменте и фиксации положения). // Проблемы фиксирования никакой нет в сервоприводе в отличие от шагового. Высокоточное позиционирование и удержание в заданной позиции обеспечивается работой электрической машины в вентильном режиме, суть которого сводится к её работе в качестве источника силы. В зависимости от рассогласования положения (и других координат электропривода) формируется задание на силу. При этом несомненным преимуществом сервопривода является энергоэффективность: ток подается только в том необходимом для того объеме, чтобы удержать рабочий орган в заданном положении. В противоположность шаговому режиму, когда подается максимальное значение тока, определяющее угловую характеристику машины. Угловая характеристика машины аналогична при малых отклонениях механической пружине, которая пытается «притянуть» рабочий орган в нужную точку. В шаговом приводе чем больше рассогласование положения, тем больше сила при неизменном токе. Очевидно, что автор ошибается в данном тезисе. Более того, известны примеры сложных систем управления электроприводом в шаговом режиме, которые не рассмотрены в данной статье, в частности микрошаговый режим.
Особенности устройства сервопривода переменного тока
Это подвид синхронной модели, у которого ротор вращается с той же частотой, какая присуща магнитному полю, созданному обмотками статора. На последний направляется трехфазное напряжение, запускающее весь процесс функционирования.
На подвижной части закреплен энкодер, разрешающая способность которого сравнительно высокая. От него поступает один сигнал на первый вход, а от электронной платы – другой, на второй. Данная пара сравнивается, и разница между ними является показателем рассогласования, отталкиваясь от которого необходимо задать команду подачи соответствующего вольтажа для скорейшего наступления нулевого момента.
Читая о том, как работает модель, в технической литературе часто можно встретить термин «сервоусилитель»: что это такое? Это плата – блок управления, а мы уже выяснили, что она из себя представляет и для чего необходима, так что не пугайтесь нового определения.
Область применения
В данный момент сервоприводы получили достаточно широкое распространение. Их можно встретить в точных приборах, автоматах, производящих различные платы, программируемых станках, промышленных роботах и других механизмах. Большую популярность приводы такого типа приобрели в авиамодельной сфере за счет эффективного расхода энергии и равномерного движения.
Сервоприводы меняются и развиваются. В самом начале появления они обладали коллекторными моторами с обмотками на роторе. Постепенно число обмоток выросло, также увеличилась и скорость вращения и разгона. Позже обмотки начали располагаться снаружи магнита, что также способствовало повышению эффективности работы. Дальнейшие усовершенствования позволили отказаться от коллектора, стали использоваться постоянные магниты ротора. Наиболее популярны сейчас сервоприводы, которые работают от программируемого контроллера. Это дает возможность создавать приборы высокой точности и современную технику.
Возможность достижения высокой точности часто становится решающим фактором для применения сервопривода. Кроме того, благодаря новым цифровым разработкам, позволяющим предусмотреть различные способы связи с объектами, система использует компьютер для управления и настройки, что значительно упрощает работу.
В различных сферах также используются серводвигатели. Они могут перемещать выходной вал в заданное положение и удерживать его автоматически. Также помогут придать движение какому-либо механизму, координируемому вращениями вала. Для мотора важными параметрами являются равномерность и тональность движения, эффективность затрачиваемой энергии.





